

「ローレンツ変換」と似た意味で…
ローレンツブーストは虚数角の座標回転

こちらの記事の最後で「ローレンツ・ブーストは虚数角の座標回転を表す」と書きました。
(ローレンツ変換とローレンツ・ブーストにはこちらの記事に書いたような違いがあります。一般にはローレンツ・ブーストのことをローレンツ変換と呼ぶことも多いです)
ローレンツ・ブーストとは速度の異なる慣性系への座標変換で、特殊相対性理論の柱となります。
具体的には次式です(x方向ブーストの場合。導出はこちら)。
$$
\left(\begin{array}{c}
ct’ \\ x’ \\ y’ \\ z’
\end{array}\right)
=
\begin{pmatrix} \gamma & -\gamma \beta & 0 & 0 \\ -\gamma \beta & \gamma & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}
\left(\begin{array}{c}
ct \\ x \\ y \\ z
\end{array}\right) \tag{1}$$
この記事では、ローレンツ・ブーストを虚数角の座標回転とみなすことについて
・みなせるための条件
・みなせる理由の説明
を順に説明します。
(スマホでご覧の方で式の右側がはみだして表示される場合は、式を左右にドラッグすればスクロールします)
虚数角の座標回転とみなせるための条件は?
ローレンツ・ブーストを虚数角の回転だとみなすには、ひとつ前提条件があります。それは、
特殊相対論でおなじみの x-ct グラフ(ミンコフスキー図)で考えるのではなく、x-ict グラフで考える必要がある
ということです。
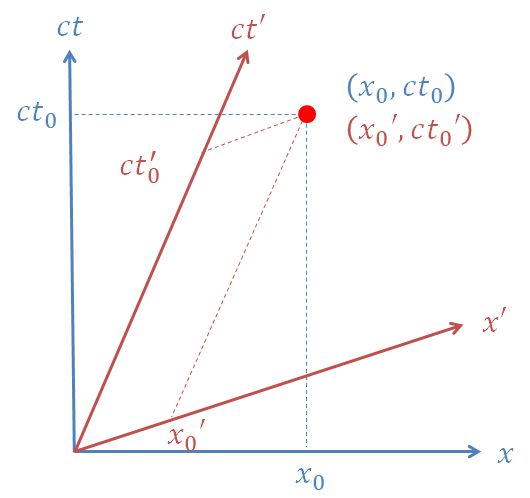
もしもx-ct グラフで考えると、ご存知のとおり x-ct グラフはローレンツ・ブーストによって x 軸と ct 軸が斜交するように変形するので、回転の関係にはなりません(下図)。
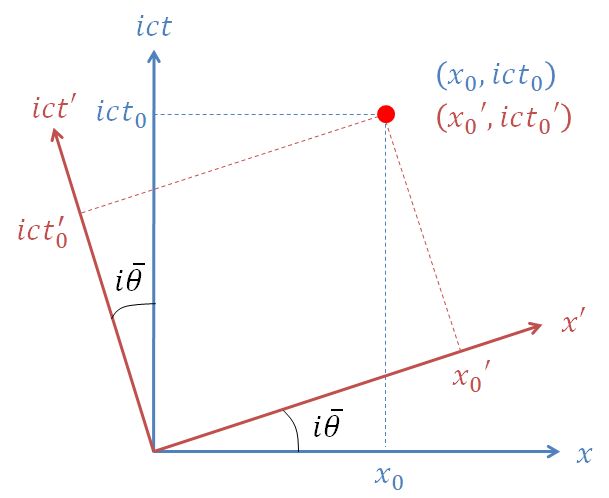
一方、横軸を \(x\), 縦軸を \(ict\) とするグラフで考えれば、ローレンツ・ブーストは虚数角の回転とみなすことができます(下図)。
 横軸を \(x\), 縦軸を \(ict\) とするグラフで考えれば、ローレンツ・ブーストは虚数角の回転とみなせる理由をこれから説明します。
横軸を \(x\), 縦軸を \(ict\) とするグラフで考えれば、ローレンツ・ブーストは虚数角の回転とみなせる理由をこれから説明します。■虚数角の座標回転とみなせる理由は?
【命題】
ローレンツ・ブーストは、\(\gamma = \cos{i \bar{\theta}}\) (\(\bar{\theta}\): 実数)とおくと、
\(x-ict\) 平面で \(i\bar{\theta}\) 回転する変換だと解釈できる。
図は1つ上の図をご覧ください。
話をシンプルにするため、空間軸は \(x\) 軸だけとして考えます。
■ ローレンツ・ブーストの式から出発、回転を表す式へと変形していく
まず、ローレンツ・ブーストは次のように書けます。(1)の空間軸を \(x\) 軸だけにしたものです。
$$
\left(\begin{array}{c}
ct’ \\ x’
\end{array}\right)
=
\begin{pmatrix} \gamma & -\gamma \beta \\ -\gamma \beta & \gamma\end{pmatrix}
\left(\begin{array}{c}
ct \\ x
\end{array}\right) \tag{2}$$方針としては、この式を変形して、なるべく普通の空間座標における回転を表す式
$$
\left(\begin{array}{c}
y’ \\ x’
\end{array}\right)
=
\begin{pmatrix} \cos{\theta} & -\sin{\theta} \\ \sin{\theta} & \cos{\theta}\end{pmatrix}
\left(\begin{array}{c}
y \\ x
\end{array}\right) \tag{3}$$の形に近づけていきます((3)の両辺の上が \(y\) 成分、下が \(x\) 成分になっている理由は、(2)で縦軸である \(ct\) 軸の座標を上に書いていることに対応させるためです)。
■ 何から手をつけるか
x-y 座標系での回転の不変量は \(x^2 + y^2\) (原点からの空間的な距離)です。
一方、x-ct 座標系でのローレンツ・ブーストの不変量は \(-(ct)^2 + x^2\) です。
一応確認してみると
$$-(ct’)^2 + (x’)^2 = -(\gamma ct – \gamma \beta x)^2 + (-\gamma \beta ct + \gamma x)^2 = \cdots = (ct)^2 – x^2$$となり、たしかに不変量になっています。\((ct)^2 + x^2\) だと不変量にはなりません。
つまり、x-y座標系の回転とx-ct座標系のローレンツ・ブーストでは不変量が異なるのです。
なので、まずは x-ct 座標系のローレンツ・ブーストにおける不変量を、x-y 座標系と同じ形の式になるようにします。
■ 不変量の定義式を空間における距離の定義式の形にする
x-ct 座標系のローレンツ・ブーストにおける不変量を、x-y座標系における不変量(距離)の定義式と同じ形にするにはどうすればよいでしょうか。
それは、x-ct グラフから x-ict グラフに変更することです。
どういうことかを図に示します。
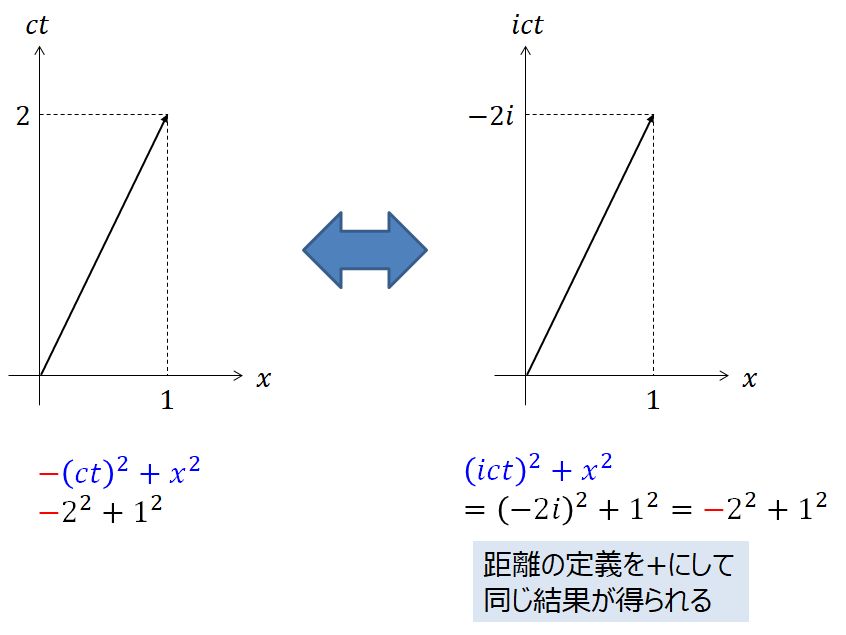
左が x-ct グラフ(ミンコフスキー図)、右が x-ictグラフです。これらは等価です。
左のグラフの \(ct = 2\) という座標は、右のグラフの \(ict = -2i\) と等価です(\((-2i)(ict)=2ct\) より)。
左のグラフの不変量は \(-(ct)^2+x^2\) なのに対して右のグラフの不変量は \((ict)^2 + x^2\) です。
等価性を維持したまま、x-yグラフと同じ計算式で計算することができるようになりました(^^)。
では、ローレンツ・ブーストの式 (1) の第1成分を \(ct\) から \(ict\) に変更してみましょう。
$$
\left(\begin{array}{c}
ict’ \\ x’
\end{array}\right)
=
\begin{pmatrix} \gamma & -i\gamma \beta \\ i\gamma \beta & \gamma\end{pmatrix}
\left(\begin{array}{c}
ict \\ x
\end{array}\right) \tag{4}$$これで x-y グラフと同じ計算式で不変量が計算できるはずです。
念のため確認しておきましょう。
$$(ict’)^2 + (x’)^2 = (i \gamma ct – i \gamma \beta x)^2 + (-\gamma \beta ct + \gamma x)^2 = \cdots = (ict)^2 + x^2 \tag{5}$$OKですね。不変量を \(-(ct^2) + x^2\) から \((ict)^2 + x^2\) に変えることができました。
■ 回転の形で表す
(2)と(4)を並べてみます。
$$
\left(\begin{array}{c}
y’ \\ x’
\end{array}\right)
=
\begin{pmatrix} \cos{\theta} & -\sin{\theta} \\ \sin{\theta} & \cos{\theta}\end{pmatrix}
\left(\begin{array}{c}
y \\ x
\end{array}\right) \tag{2}$$$$
\left(\begin{array}{c}
ict’ \\ x’
\end{array}\right)
=
\begin{pmatrix} \gamma & -i\gamma \beta \\ i\gamma \beta & \gamma\end{pmatrix}
\left(\begin{array}{c}
ict \\ x
\end{array}\right) \tag{4}$$そっくりですね。あとは(4)を(2)の形に書き換えられることを示せればOKです。
まず変換行列の左上の成分に注目しましょう。
(2) の \(\cos{\theta}\) に対応するのは(4)の \(\gamma\) ですね。単純に考えれば
$$\gamma = \cos{\theta} \tag{5}$$とおきたいところですが、\(\left| \cos{\theta} \right| \le 1\) なのに対して \(\gamma\) は \(\gamma \ge 1\) なのでそのまま置き換えるわけにはいきません。
ここでちょっとひらめきが必要なのですが、もしも \(\theta\) が虚数で \(\theta = i \bar{\theta}\) (\(\bar{\theta}\) は実数) とすると(5)はどうなるでしょうか?
双曲線関数の公式 \(\cos{ix} = \cosh{x}\) を使うと
$$\gamma = \cos{i \bar{\theta}} = \cosh{\bar{\theta}} \tag{6}$$となります(双曲線関数についてはこちらにまとめてあります)。
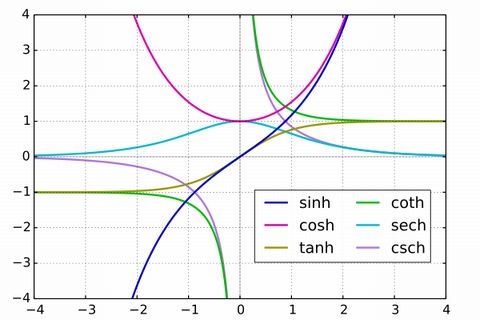
\(\cosh{\bar{\theta}}\) であれば、下図のとおり \(\cosh{\bar{\theta}} \ge 1\) なので \(\gamma\)の値をカバーできます。
任意の \(\gamma\) の値に対して対応する \(\bar{\theta}\) が2つ存在することもわかります。
では次。変換行列の左下の成分に注目しましょう。
(2)の \(\sin{\theta}\) に対応するのは(4)の \(i\gamma \beta\) ですね。
ここで
\begin{eqnarray}(\gamma \beta)^2 &=& \frac{\beta^2}{1-\beta^2} = \frac{1 – (1 -\beta^2)}{1-\beta^2} \\
&=& \gamma^2 – 1 = \cosh^2{\bar{\theta}} -1 = \sinh^2{\bar{\theta}}\end{eqnarray}より
$$\gamma \beta = \pm \sinh{\bar{\theta}}$$ここで左辺の\(\gamma \beta\) は任意の実数値を取り得ますが、\(\sinh{\bar{\theta}}\) のグラフが上図のようであることを考えると、\(+\sinh{\bar{\theta}}\) ですべて対応できます。そこで、与えられた \(\gamma, \beta\) に対して
$$\gamma \beta = \sinh{\bar{\theta}}$$とおくことにします。すると、さきほど \(\bar{\theta} \ge 0\)の符号によって、2つ存在しえるとしていた \(\cosh{\bar{\theta}}\) の \(\bar{\theta}\) も1つに決まることになります。
よって再掲すると
$$
\left(\begin{array}{c}
y’ \\ x’
\end{array}\right)
=
\begin{pmatrix} \cos{\theta} & -\sin{\theta} \\ \sin{\theta} & \cos{\theta}\end{pmatrix}
\left(\begin{array}{c}
y \\ x
\end{array}\right) \tag{2}$$$$
\left(\begin{array}{c}
ict’ \\ x’
\end{array}\right)
=
\begin{pmatrix} \gamma & -i\gamma \beta \\ i\gamma \beta & \gamma\end{pmatrix}
\left(\begin{array}{c}
ict \\ x
\end{array}\right) \tag{4}$$の(4)は
$$
\left(\begin{array}{c}
ict’ \\ x’
\end{array}\right)
=
\begin{pmatrix} \cosh{\bar{\theta}} & -i \sinh{\bar{\theta}} \\ i \sinh{\bar{\theta}} & \cosh{\bar{\theta}}\end{pmatrix}
\left(\begin{array}{c}
ict \\ x
\end{array}\right) \tag{7}$$と書き換えられることがわかりました。
最終目標は(2)の形であって(7)の形ではありません。
そこで再び双曲線関数の公式を使います。
$$\cos{ix} = \cosh{x}, \ \ \sin{ix} = i \sinh{x}$$$$\cosh{ix} = \cos{x}, \ \ \sinh{ix} = i \sin{x}$$ を使うと(7)は
$$
\left(\begin{array}{c}
ict’ \\ x’
\end{array}\right)
=
\begin{pmatrix} \cos{i\bar{\theta}} & -\sin{i\bar{\theta}} \\ \sin{i \bar{\theta}} & \cos{i\bar{\theta}}\end{pmatrix}
\left(\begin{array}{c}
ict \\ x
\end{array}\right)$$となります。
これで命題
ローレンツ・ブーストは、\(\gamma = \cos{i \bar{\theta}}\) (\(\bar{\theta}\): 実数)とおくと、
\(x-ict\) 平面で \(i\bar{\theta}\) 回転する変換だと解釈できる。
が示せました。
(眠い目をこすりながら書いたのでどこか間違えている可能性もあります。その場合ご指摘いただけると助かります)
参考:
・相対論入門 ―時空の対称性の視点から― (フロー式 物理演習シリーズ 18)
・高校数学でわかる相対性理論 (ブルーバックス)
0

