2次元極座標で、質点の位置、速…
2次元極座標での速度、加速度の求め方 (2/2)
(前回の続きです)
(数式が画面右側にはみ出す場合は、個々の数式を横方向にスクロールできます)
2次元極座標での速度、加速度の求め方について、自分なりに、図を使わずに、かつもう少し機械的に応用が利きそうな方法を考えてみました。
図で書くとこうなります(クリックで拡大)↓
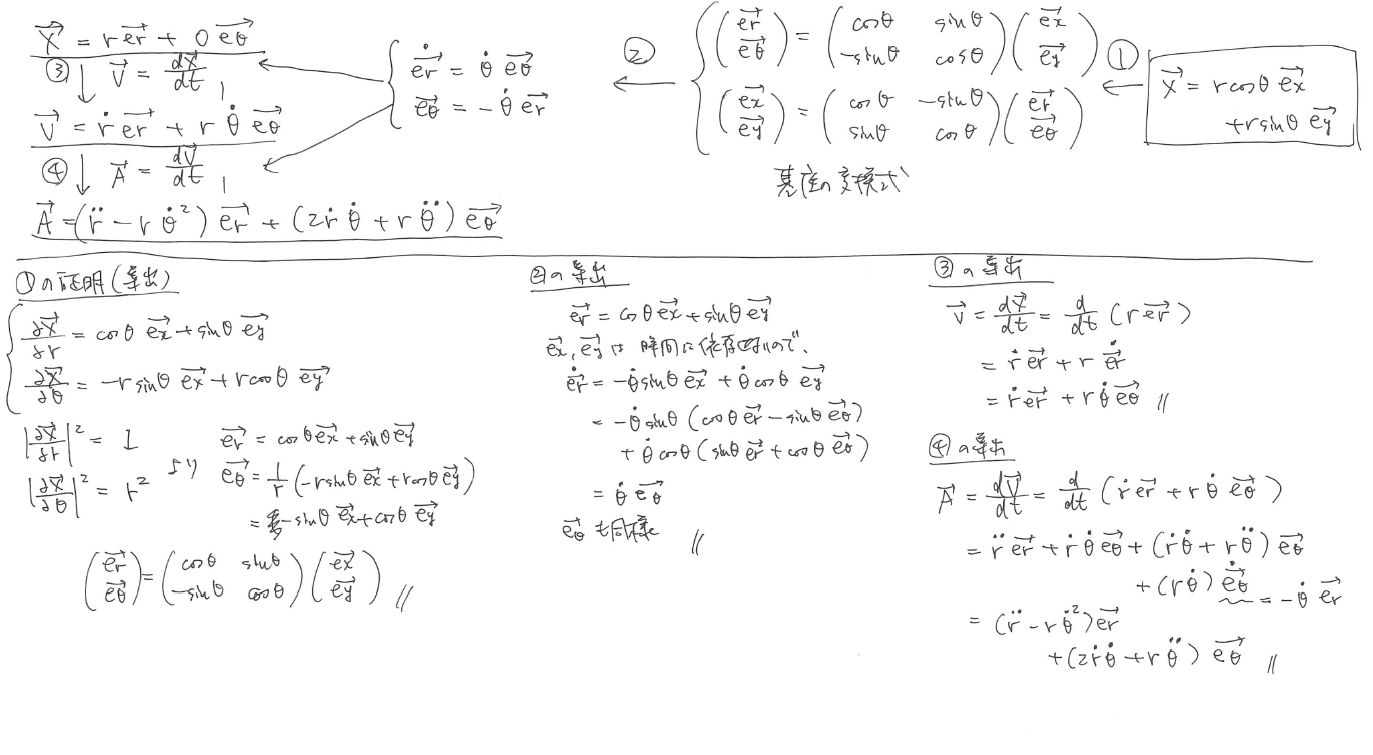
極座標での速度、加速度の求め方
■ 必要な情報
・時間変化しない座標系(例えばデカルト座標系)と今知りたい座標系の関係式
■ 手順(極座標の場合)
位置は \(\vec{X} = r \vec{e_r} + 0 \vec{e_\theta}\) と表せるので、速度 \(\vec{V}\)は
\begin{eqnarray}
\vec{V} &=& \frac{d\vec{X}}{dt}=\frac{d}{dt}\left( r\vec{e_r} \right) \\
&=& \dot{r} \vec{e_r} + r \dot{\vec{e_r}} \tag{1}
\end{eqnarray} ここで第2項に \(\dot{\vec{e_r}}\) が出てきました。これが未知なので導出する必要があります(デカルト座標系だと基底は時間変化しませんが、極座標系だと物体の位置に合わせて基底\(\vec{e_r}, \vec{e_\theta}\)の向きが変化しますので、どのように変化するのかを求める必要があるということです)。
(1) 極座標とデカルト座標の関係式を立てます。
$$\vec{X}=r\cos{\theta}\vec{e_x}+r\sin{\theta}\vec{e_y}$$
(2) \((\vec{e_r}, \vec{e_\theta})\) と \((\vec{e_x}, \vec{e_y})\) の関係式を出します。
①そのためにまず \(\frac{\partial{\vec{X}}}{\partial{r}}, \frac{\partial{\vec{X}}}{\partial{\theta}}\) を求めます。
これらはそれぞれ \(\vec{e_r}, \vec{e_\theta}\) の向きを表します。
\begin{eqnarray}
\vec{e_r}の向き=\frac{\partial{\vec{X}}}{\partial{r}}&=&\cos{\theta}\vec{e_x}+\sin{\theta}\vec{e_y} \\
\vec{e_\theta}の向き=\frac{\partial{\vec{X}}}{\partial{\theta}}&=&-r\sin{\theta}\vec{e_x}+r\cos{\theta}\vec{e_y}
\end{eqnarray}② 規格化します。
$$\left|\frac{\partial{\vec{X}}}{\partial{r}}\right|^2=1, \left|\frac{\partial{\vec{X}}}{\partial{\theta}}\right|^2=r^2$$ より(これらの平方根を「スケールファクター」と呼びます)\(\vec{e_r}, \vec{e_\theta}\) を規格化すると、
\begin{eqnarray}
\vec{e_r}&=&\cos{\theta} \vec{e_x} + \sin{\theta} \vec{e_y} \\
\vec{e_\theta}&=&\frac{1}{r}\left(-r \sin{\theta} \vec{e_x} + r * \cos{\theta}\vec{e_y} \right) \\
&=& – \sin{\theta} \vec{e_x} + \cos{\vec{e_y}}
\end{eqnarray}行列で表すと
$$\left(
\begin{array}{c}
\vec{e_r} \\
\vec{e_\theta}
\end{array}
\right)
=
\left(
\begin{array}{cc}
\cos{\theta} & \sin{\theta} \\
-\sin{\theta} & \cos{\theta}
\end{array}\right)
\left(
\begin{array}{c}
\vec{e_x} \\
\vec{e_y}
\end{array}
\right) \tag{2}$$逆行列をとると
$$\left(
\begin{array}{c}
\vec{e_x} \\
\vec{e_y}
\end{array}
\right)
=
\left(
\begin{array}{cc}
\cos{\theta} & -\sin{\theta} \\
\sin{\theta} & \cos{\theta}
\end{array}\right)
\left(
\begin{array}{c}
\vec{e_r} \\
\vec{e_\theta}
\end{array}
\right) \tag{3}$$
(2)の両辺を時間で微分すると、\(\vec{e_x}, \vec{e_y}\) は時間変化しないので、
\begin{eqnarray}
\dot{\vec{e_r}} &=& -\dot{\theta}\sin{\theta} \vec{e_x} + \dot{\theta}\cos{\theta}\vec{e_y} \\
&=& -\dot{\theta}\sin{\theta} (\cos{\theta}\vec{e_r}-\sin{\theta}\vec{e_\theta}) + \dot{\theta}\cos{\theta}(\sin{\theta}\vec{e_r}+\cos{\theta}\vec{e_\theta}) \\
&=& \dot{\theta}\vec{e_\theta} \tag{4}
\end{eqnarray}同様にして
$$\dot{\vec{e_\theta}}=-\dot{\theta}\vec{e_r} \tag{5}$$
(3) (1)(4)(5)から \( \vec{V}, \vec{A} \) を求める
(1)に(4)を代入して
$$\vec{V} = \dot{r} \vec{e_r} + r \dot{\vec{e_r}} = \dot{r} \vec{e_r} + r \dot{\theta}\vec{e_\theta} \tag{6}$$\begin{eqnarray}
\vec{A} &=& \frac{d\vec{V}}{dt} = \frac{d}{dt}(\dot{r}\vec{e_r}+r\dot{\theta}\vec{e_\theta})\\
&=& \ddot{r}\vec{e_r} + \dot{r}\dot{\theta}\vec{e_\theta} + (\dot{r}\dot{\theta}+r\ddot{\theta})\vec{e_\theta} + (r\dot{\theta})\dot{\vec{e_\theta}} \\
&=& (\ddot{r}-r\dot{\theta}^2)\vec{e_r} + (2\dot{r}\dot{\theta}+r\ddot{\theta})\vec{e_\theta} \tag{7}
\end{eqnarray}
(6)(7)は求めたかった \(\vec{V}, \vec{A}\) に一致します。
・位置 \(\vec{X} = r \vec{e_r} + 0 \vec{e_\theta}\)
・速度 \(\vec{V} = \dot{r} \vec{e_r} + r\dot{\theta} \vec{e_\theta}\)
・加速度 \( \vec{A} = (\ddot{r}-r\dot{\theta}^2) \vec{e_r} + (2 \dot{r} \dot{\theta} + r \ddot{\theta})\vec{e_\theta}\)
((前回の冒頭に記載したものを再掲)
実用上は、上記のようなことを毎回やるわけではなく、結論の式を参照しながら使えばいいと思います。
6